智能体仿真模型
本教程完整工作流: MIT校园仿真
Agent-based model (ABM) 是一种基于个体行为和交互的建模方法,用于模拟复杂系统的动态演化。在城市仿真中,ABM 可以用来模拟城市中人群、交通、建筑等元素之间的相互作用。通过定义智能体(agents)的行为规则及其与环境的交互,可以研究城市系统中的各种现象,例如通勤模式、交通拥堵、土地利用变化等。本教程将介绍在CityFlow平台中如何构建一个基于智能体的城市仿真模型,并详细说明如何创建仿真环境、编写智能体、定义智能体行为、自定义显示输出和数据输出,以及运行仿真模拟。
本教程主要使用 Mesa 和 Mesa-Geo 构建仿真模拟,更多信息可查看其官方文档:
创建仿真环境
在城市仿真中,首先需要创建一个包含空间信息的仿真环境。常用的仿真环境有网格环境,让智能体在NxN的网格中活动,以及网络环境,让智能体在道路形成路网中活动。本教程通过加载GIS数据形成一个网络环境,模拟智能体在校园路网中的活动。实现仿真计算的主要模块,是示例工作流中的Mesa Simulator模块,该模块中共有6个代码文件:
entrypoint.py: 运行仿真的主入口;kendall_model.py: 仿真模型的定义文件;kendall_agent.py: 仿真智能体的定义文件;base_agent.py: 定义基础智能体的辅助文件,一般情况下无需修改;base_space.py: 定义仿真环境的辅助文件,一般情况下无需修改;base_data.py: 定义数据收集器的辅助文件,一般情况下无需修改;
我们首先在kendall_model.py中定义一个基础模型,下面是模型文件的基本框架,完整文件可在工作流中的Mesa Simulator模块查看。
#kendall_model.py
class Kendall(mesa.Model):
def __init__(self,
road_data:dict,
crs:str ='epsg:4326'):
super().__init__()
# GIS数据坐标系
self.crs = crs
# GIS路网
road_df = gpd.GeoDataFrame.from_features(road_data['features'])
if not road_df.crs:
road_df.set_crs(self.crs,inplace=True)
# 将GIS路网转换为网络方便进行路径计算
self.network = RoadNetwork(road_df=road_df, crs=crs)
#初始化仿真环境
self.space = CommuteSpace(crs=self.crs,warn_crs_conversion=False)
#定义仿真中的时间单位(如每步代表 1 分钟),并初始化时间变量
self.minute_per_step = 1
self.hour = 8
self.minute = 0
self.step_count = self.hour*60//self.minute_per_step + self.minute//self.minute_per_step
def init_agents(self):
#初始化智能体的函数
return
def collect_data(self):
#收集输出数据的函数
return
def step(self):
#每一步仿真运行的函数
return
def get_agent_property(self,agent):
#收集智能体属性的函数
return properties
def get_render_data(self):
# 输出可视化数据的函数
return
# 从GIS数据创建智能体的辅助函数
def _load_from_geojson(self, key:str, data:gpd.GeoDataFrame, agent_class:mg.GeoAgent, id_key:str="index"):
agentcreator = mg.AgentCreator(agent_class=agent_class, model=self)
agents = agentcreator.from_GeoDataFrame(data)
self.space.add_agents(agents)
self.__setattr__(key,agents)
self.current_id = len(agents)
return agents
# 更加仿真时间的辅助函数
def _update_time(self):
self.hour = self.step_count * self.minute_per_step // 60
self.minute = self.step_count * self.minute_per_step % 60
智能体编写
在城市仿真中,智能体是模拟的核心单元。以下是kendall_agents.py两种主要智能体的实现:
- 建筑智能体
属性:建筑物内人群数量
#kendall_agents.py
# 继承 GeoAgent 类
class Building(mg.GeoAgent):
def __init__(self, model, geometry, crs=None, render=True):
# 模型的坐标系
if not crs:
crs = model.crs
super().__init__(model, geometry, crs)
# 是否输出渲染
self.render = render
# 建筑物内人群数量
self.num_residents = 0
def step(self):
# 每一步中执行的动作函数
return
- 人群智能体
属性:居住地点、办公地点、速度、当前状态、当前目的地等
#kendall_agents.py
#继承`base_agent.py`中定义好的可移动智能体`Commuter`类
class Resident(Commuter):
def __init__(self, model, geometry, crs=None, render=True):
#模型的坐标系
if not crs:
crs = model.crs
Commuter.__init__(self,model, geometry, crs)
self.crs = crs
self.house = None
self.office = None
self.render = render
self.status = "office"
#unit m/step
self.speed = 1.2*model.minute_per_step*60
self.target = None
self.path_data = []
def set_house(self, house):
# 初始化家庭地址
def set_office(self, office):
# 初始化办公地址
def prepare_to_move(self):
# 移动之前的功能函数
def move(self):
# 移动中的功能函数
def step(self):
# 每一步中执行的动作函数
self.prepare_to_move()
self.move()
智能体行为编写
智能体的行为由 step 方法定义,该方法在每一步仿真时调用。以下是智能体行为的关键点:
- 建筑智能体 : 记录建筑物内的人群数量,并在每一步更新人群数量
#kendall_agents.py
class Building(mg.GeoAgent):
# ... 其他代码 ... #
def step(self):
resident_points = [x.geometry for x in self.model.agents_by_type[Resident] if self.geometry.contains(x.geometry)]
self.num_residents = len(resident_points)
- 人群智能体 :
- 准备移动 :根据当前时间和目标位置计算路径
- 移动 :沿着路径逐步移动,并在到达目的地后切换状态(如从“通勤”到“办公”或“居家”)
#kendall_agents.py
class Resident(Commuter):
# ... 其他代码 ... #
def prepare_to_move(self):
if self.model.step_count == 8 * 60 // self.model.minute_per_step:
self.target = self.office_point
if self.target and self.status != "transport":
self.origin = (self.geometry.x, self.geometry.y)
self.destination = (self.target.x, self.target.y)
self._prepare_to_move(self.origin, self.destination)
self.status = "transport"
def move(self):
if self.target:
self._move()
if self.office.geometry.contains(self.geometry):
self.status = "office"
self.target = self.house_point
if self.house.geometry.contains(self.geometry):
self.status = "house"
self.target = self.office_point
自定义数据输出
数据收集器(DataCollector)用于记录仿真过程中的关键指标,例如居民状态分布和交通流量等数据。使用数据收集器,我们需要在模型初始化时,注册需要收集的变量,并在collect_data函数中定义数据的收集方式,然后在模型更一步更新中调用self.datacollector.collect_data():
#kendall_model.py
class Kendall(mesa.Model):
def __init__(self,
building_data:dict,
road_data:dict,
population:int,
crs:str ='epsg:4326'):
super().__init__()
# ... 其他代码 ...
#初始化数据收集器,注册需要收集的变量名称
self.datacollector = DataCollector(self)
# record=False 只会保存最新的数据
self.datacollector.register("resident_status",record=False)
# record=True 会将每一步收集的数据记录成一个列表
self.datacollector.register("traffic",record=True)
# ... 其他代码 ...
def collect_data(self):
#定义数据计算方式
residents = self.agents_by_type[Resident]
self.resident_status = {
"office" : len([x for x in residents if x.status=="office"]),
"house" : len([x for x in residents if x.status=="house"]),
"transport" : len([x for x in residents if x.status == "transport"])
}
self.traffic = len([x for x in residents if x.status == "transport"])
def step(self):
# ... 其他代码 ...
# 调用收集数据函数
self.datacollector.collect_data()
self._update_time()
self.step_count += 1
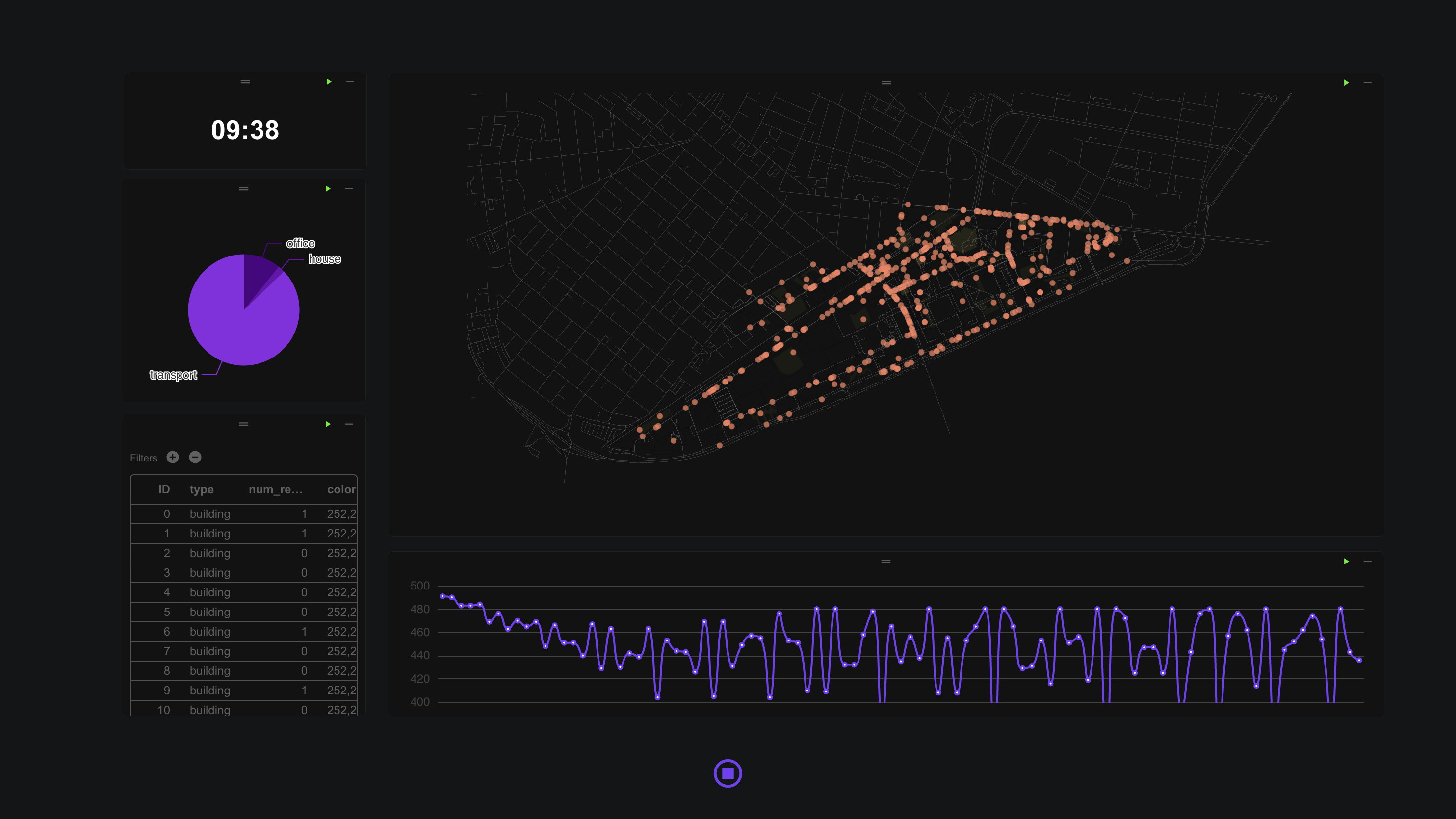
自定义显示输出
为了可视化仿真结果,我们可以通过 kendall_model.py文件中get_render_data 方法生成 GeoJSON 格式的渲染数据。这些数据包括:
- 建筑物数据 :包含建筑物的几何形状和属性(如居民数量)。
- 居民数据 :包含居民的当前位置和状态。
- 路径数据 :记录居民的移动路径。
- 统计数据 :收集的居民状态和交通流量数据。
#kendall_model.py
class Kendall(mesa.Model):
def __init__(self,
building_data:dict,
road_data:dict,
population:int,
crs:str ='epsg:4326'):
super().__init__()
# ... 其他代码 ...
# 可视化中需要使用的agent属性
def get_agent_property(self,agent):
properties = {}
if isinstance(agent, Building):
properties["type"] = "building"
properties["num_resident"] = agent.num_residents
properties["color"] = [252, 252, 68, int(agent.num_residents/10*200)]
if isinstance(agent, Resident):
properties["status"] = agent.status
properties["type"] = "resident"
return properties
# 收集可视化需要用到的数据
def get_render_data(self):
resident_data = []
path = []
building_data = {"type": "FeatureCollection", "features": []}
for agent in self.space.agents:
if agent.render:
transformed_geometry = agent.get_transformed_geometry(
self.space.transformer
)
properties = self.get_agent_property(agent)
geojson_geometry = mapping(transformed_geometry)
if isinstance(agent, Building):
building_data["features"].append({
"type": "Feature",
"geometry": geojson_geometry,
"properties": properties,
})
if isinstance(agent, Resident):
resident_data.append({
"coordinates":geojson_geometry["coordinates"],
"properties": properties,
})
path.append(agent.path_data)
# 最终输出的可视化数据
return {'building_data':building_data,
'resident_data':resident_data,
'collected_data':self.datacollector.data,
'path':path,
'step_count':self.step_count,
'time' : '{:02d}:{:02d}'.format(self.hour,self.minute),
}
def step(self):
# 每一步仿真中以随机顺序调用每一个Resident智能体的step函数
self.agents_by_type[Resident].shuffle_do("step")
# 每一步仿真中以随机顺序调用每一个Building智能体的step函数
self.agents_by_type[Building].shuffle_do("step")
# 收集数据
self.datacollector.collect_data()
# 更新时间
self._update_time()
self.step_count += 1
运行仿真模拟
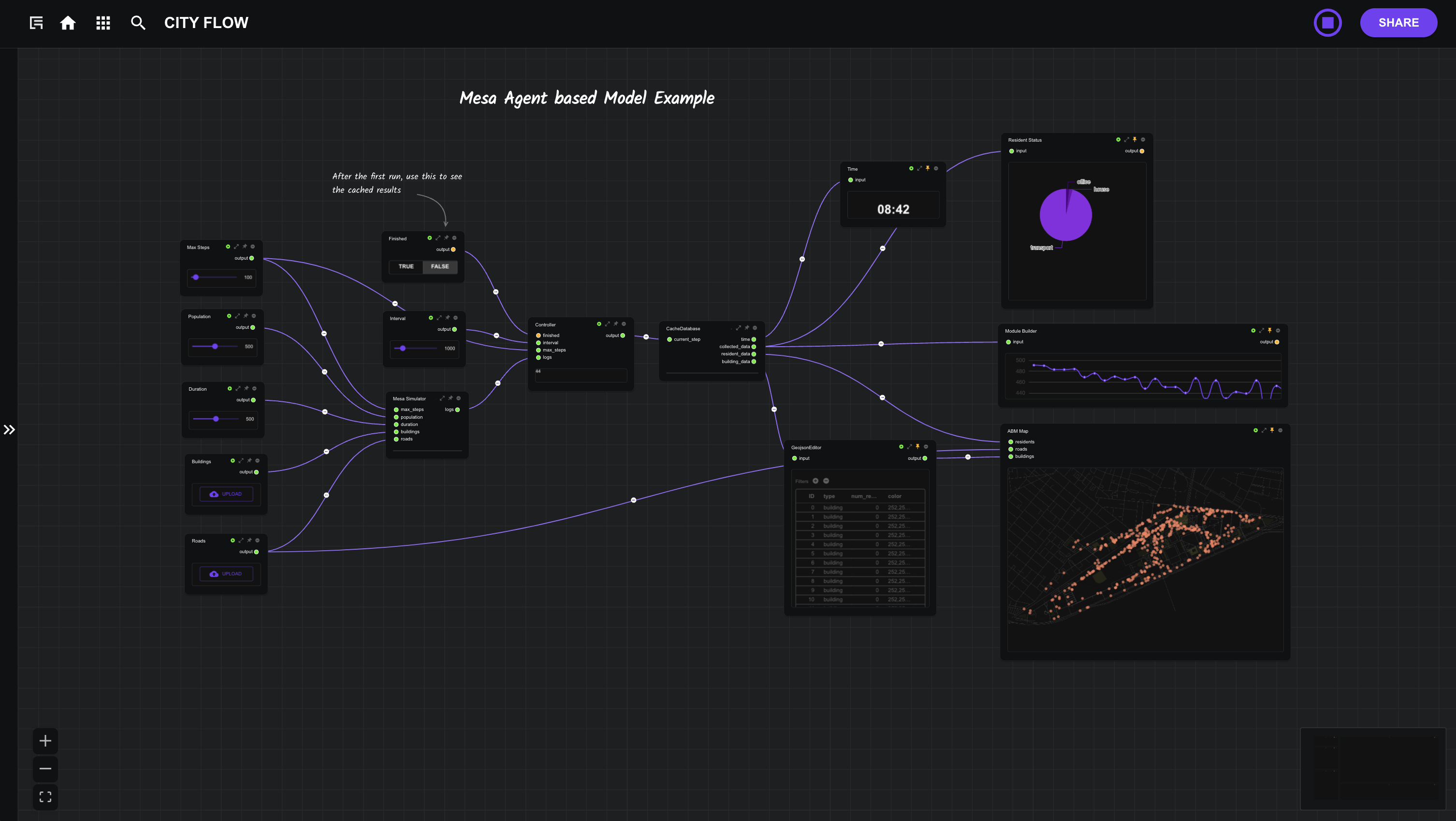
获取模型渲染输出的geojson数据后,我们使用deckgl地图模块可视化这些数据,为了加速模拟渲染,我们在第一次运行模拟时,将每一步输出的渲染输出保存至cityflow.database,这样在第一次运行结束后,可以直接调用缓存数据进行可视化,以方便展示。
最终搭建完成的工作流如下图所示,工作流的输入有以下几个参数:
- Max Steps : 仿真模拟最大运行步数
- Population : 仿真模拟的人口数
- Duration : 每一步短暂等待的时间,单位为毫秒。(默认可视化渲染的动画时间为2000ms,合理设置等待时间可以让可视化效果更加流畅)
- Building :
geojson格式建筑轮廓文件,地理坐标系默认为epsg:4326,形状类型默认为Polygon - Roads :
geojson格式路网文件,地理坐标系默认为epsg:4326,形状类型默认为LineString
输入设置完成之后,点击CityFlow顶部栏的运行按钮,即可运行仿真模拟。